研究背景
多普勒效应是一种生活中常见的频移现象,物体辐射的波长因为波源和观测者的相对运动而产生变化。在运动的波源前面,波被压缩,波长变得较短,频率变得较高;在运动的波源后面时,会产生相反的效应,波长变得较长,频率变得较低。波源的速度越高,所产生的效应越大,从而,可以根据波频移的程度来计算出波源循着观测方向运动的速度。近日,东南大学毫米波国家重点实验室崔铁军院士团队的蒋卫祥教授等人和新加坡国立大学仇成伟教授合作,设计了宽带全极化时间调制可编程超表面和自适应时变控制系统,并在此基础上研制了一种工作于微波频段的智能速度隐藏器件,它能根据运动目标的速度自动隐藏多普勒频移,无需任何人为手动操作。该智能多普勒速度隐藏器件验证了在时域中实现电磁智能调控的可行性,用于隐藏目标的运动状态,为开发其它智能超表面器件和系统提供了参考思路。
相关成果4月14日以“Smart Doppler Cloak Operating in Broad Band and Full Polarizations”为题在线发表在国际学术期刊《Advanced Materials》上。论文通讯作者为东南大学蒋卫祥教授、崔铁军院士和新加坡国立大学仇成伟教授,第一作者为东南大学博士生张信歌,其它贡献者包括东南大学硕士生孙雅伦、本科生于千和程强教授。
研究成果
研究人员通过将设计的宽带全极化且全相位覆盖的时间调制可编程超表面与搭建的自适应时变控制系统相集成,研制了一套智能速度隐藏器件,可以隐藏目标的运动状态。设想在一个运动场景中,一辆小车以速度vt驶向探测源,但探测源检测到小车的回波频率fd与源频率f0相同,即频移为零。也就是说,尽管小车在高速运动,但探测源检测到它是静止的,实现了速度隐藏。该小车的运动状态之所以探测不到,是由于其装配了设计的智能速度隐藏器件,其包含了一块时间调制可编程超表面和一个自适应时变控制系统。超薄的时域超表面覆盖在小车前方的探测区域,由具有特定波形和频率的调制信号控制。在电磁波照射下,它能够产生一个人工频移Δft来抵消运动目标固有的多普勒频移ΔfD。此外,通过改变控制信号的调制频率,可以控制人工频移Δft的大小。为了自适应提供所需的调制信号,研究人员设计了一个具有“传感-反馈-自我决策”工作机制的智能控制系统。其工作过程为:速度传感器检测小车的运动速度,然后将速度信息发送至单片机(MCU);单片机接收到速度信息后与计算机通信,指示任意波形发生器(AWG)产生相应频率的调制信号来驱动超表面。在这种自适应控制方式下,实现的智能速度隐藏器件能够自动地提供所需的频率偏移Δft,以补偿与可变速度vt相关的不同多普勒频移ΔfD,进而隐藏目标的运动状态。作为验证,分别在3.3 GHz的x和y极化波、4.9 GHz的±45°线极化波以及6.0 GHz的左旋圆极化和右旋圆极化波入射下对其进行了测试。结果表明,研制的智能速度隐藏器件对不同频率、不同极化入射电磁波均具有优异性能。
图文速览
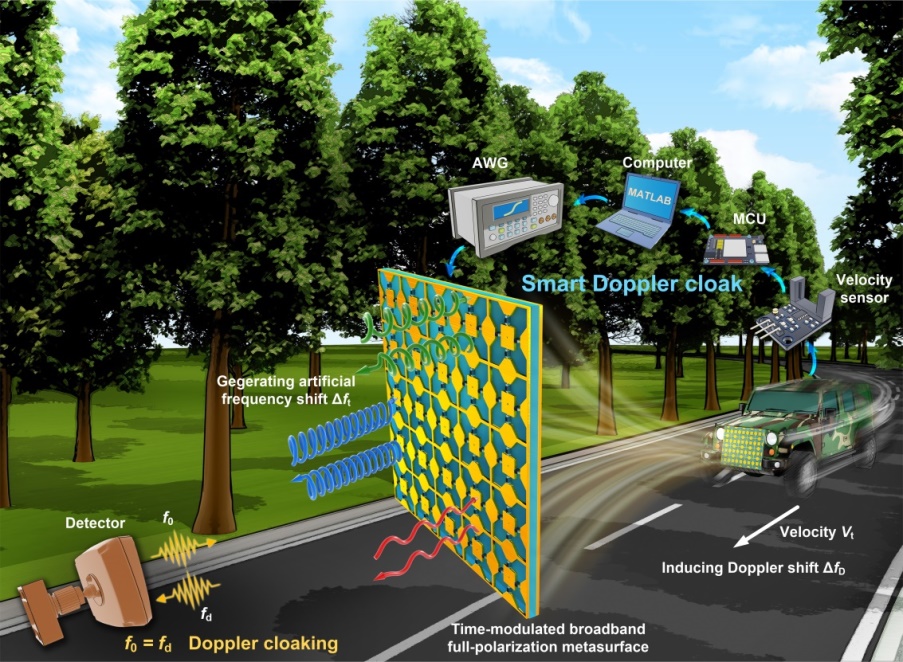
图1 宽带全极化智能超表面自适应隐藏运动物体的多普勒频移示意图
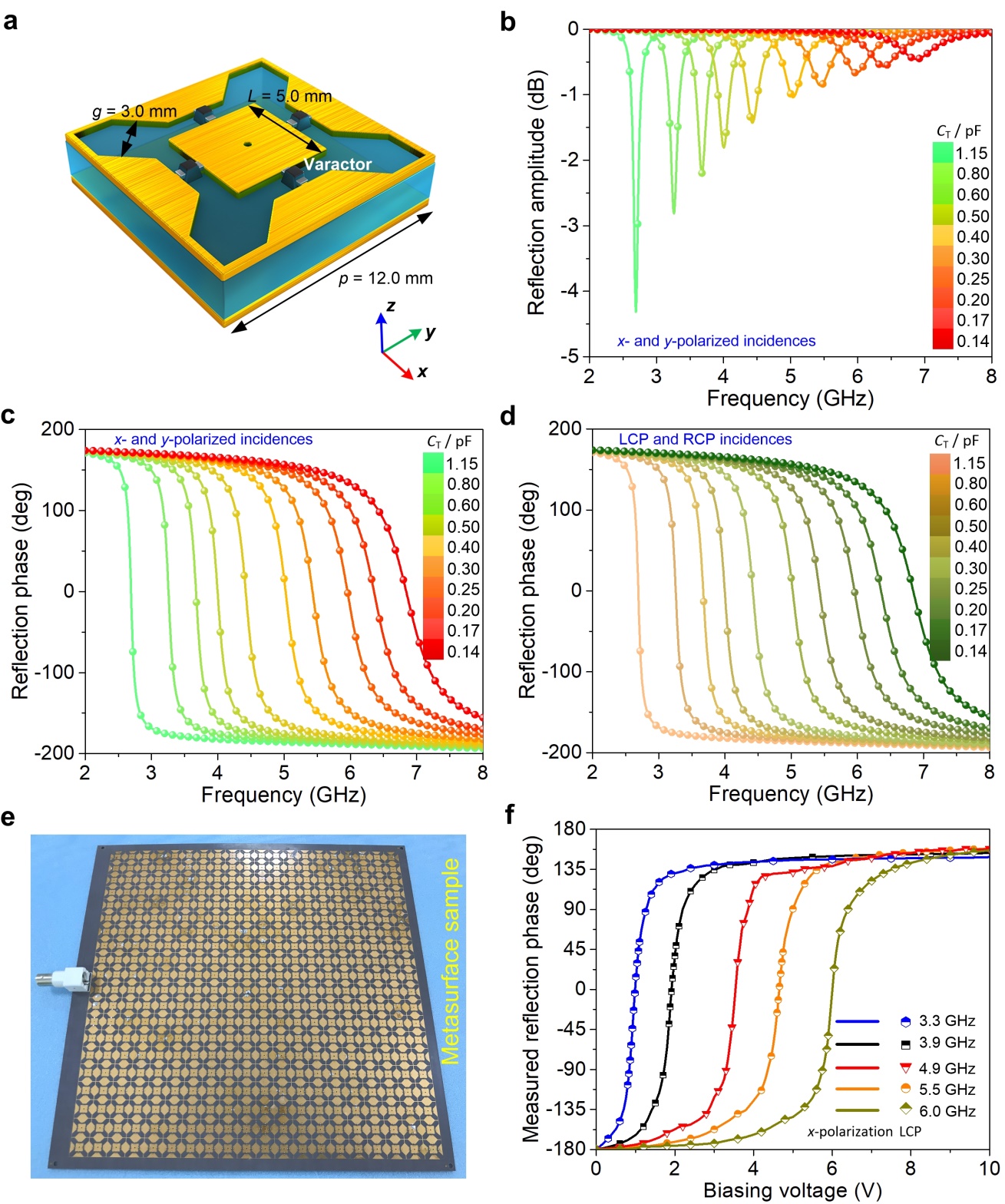
图2 宽带全极化可编程超表面及其性能
(a) 宽带全极化可编程超表面的单元结构,其中加载了四个相同的变容管;
(b) x和y极化电磁波正入射时,超表面单元在不同电容值下仿真的反射幅度随频率变化曲线;
(c) x和y极化电磁波正入射时,超表面单元在不同电容值下仿真的反射相位随频率变化曲线;
(d) LCP和RCP波正入射时,超表面单元在不同电容值下仿真的反射相位随频率变化曲线;
(e) 宽带全极化可编程超表面的加工样品;
(f) x极化波和LCP波正入射下,超表面样品在几个不同工作频点处的测试反射相位随外部偏压变化曲线。
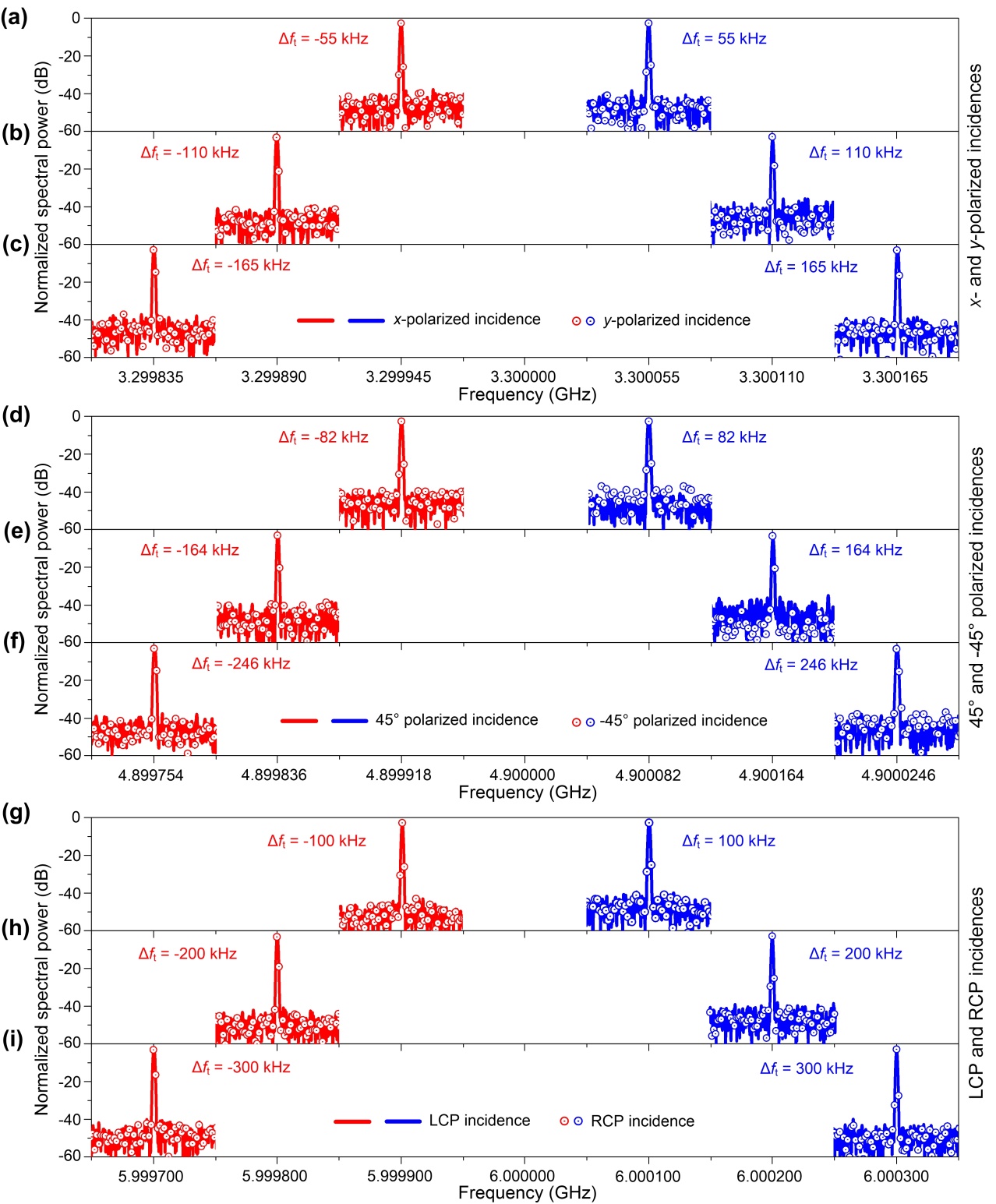
图3 智能速度隐藏器件的测试结果
(a-c) 3.3 GHz的x和y极化波照射时,智能速度隐藏器件在55 kHz、110 kHz和165 kHz三种不同调制频率下的测量反射频谱分布;
(d-f) 4.9 GHz的45°和-45°极化波照射时,智能速度隐藏器件在82 kHz、164 kHz和246 kHz三种不同调制频率下的测量反射频谱分布;
(g-i) 6.0 GHz的LCP和RCP波照射时,智能速度隐藏器件在100 kHz、200 kHz和300 kHz三种不同调制频率下的测量反射频谱分布。
